Hi,
If just started using Anvil in combination with a Raspberry Pi and a whole new world of possibilities has opened! 
I’m not a hardcore programmer, so perhaps the question I’m about to ask is a really easy one to answer.
So with Anvil I want to control the speed, direction and status of a stepper motor which is connected to the Raspberry Pi.
After reading to the documentation and seeing a couple of tutorials, I got it working! There is only one big bug remaining: I cannot stop the motor while it is running.
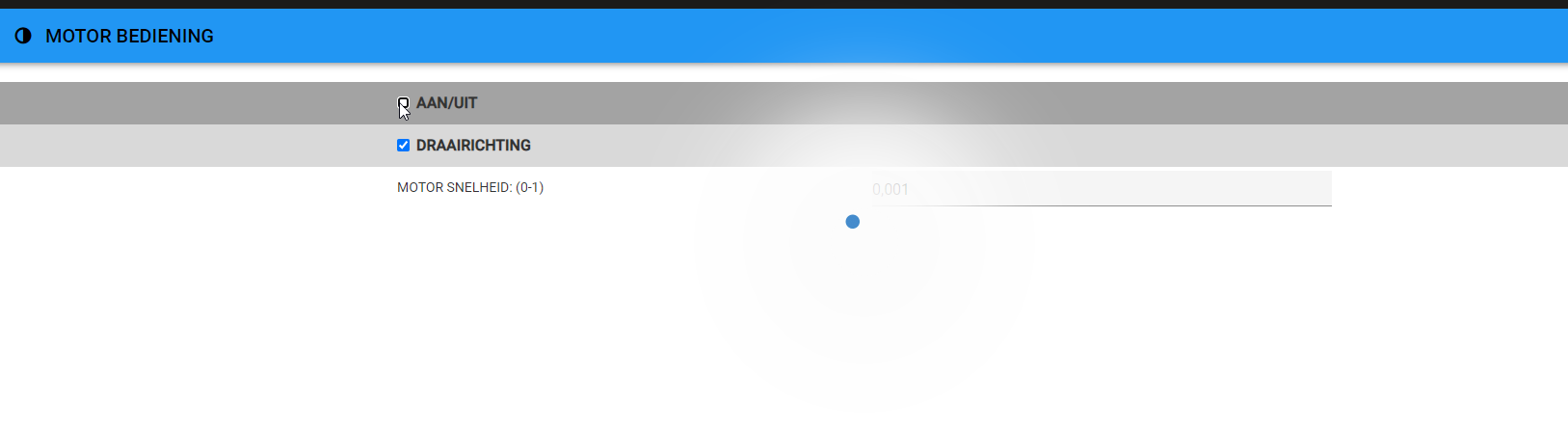
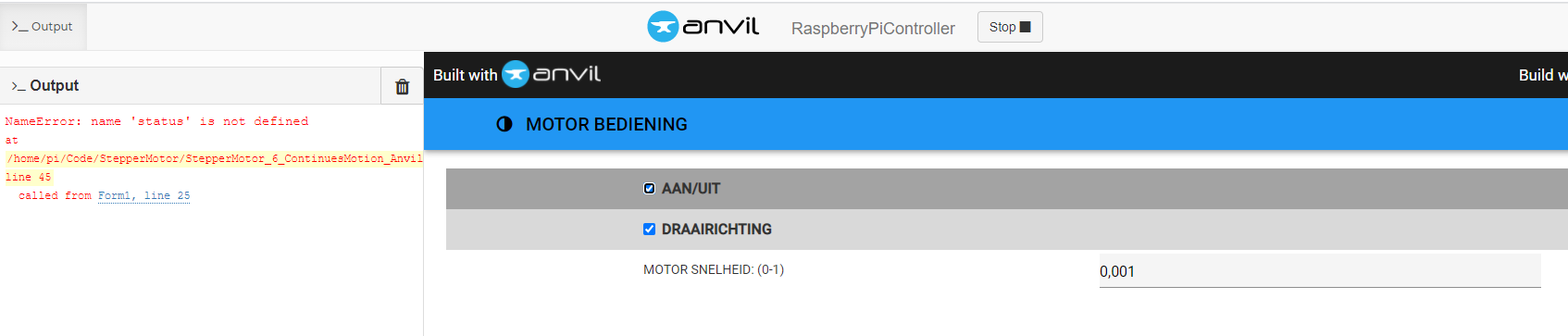
In Anvil, I control the on/off of the motor using a checkbox (AAN/UIT on photo)
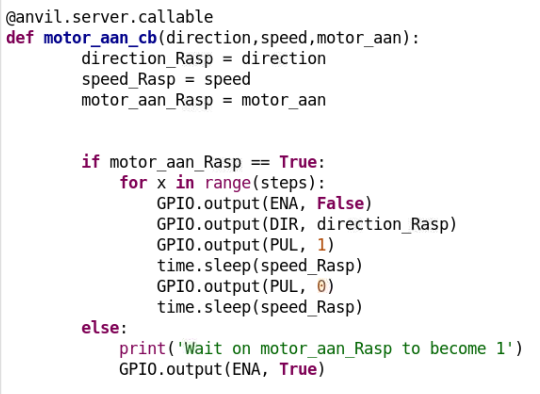
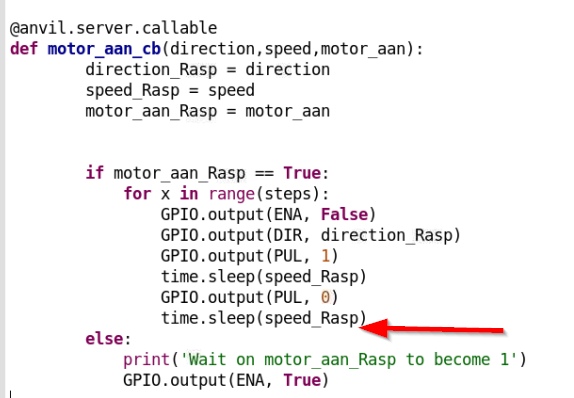
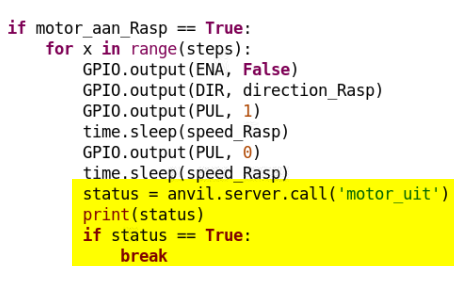
In the Raspberry Pi, i make a pulsed output using a for-loop: after 1000 pulses, the motor will stop.
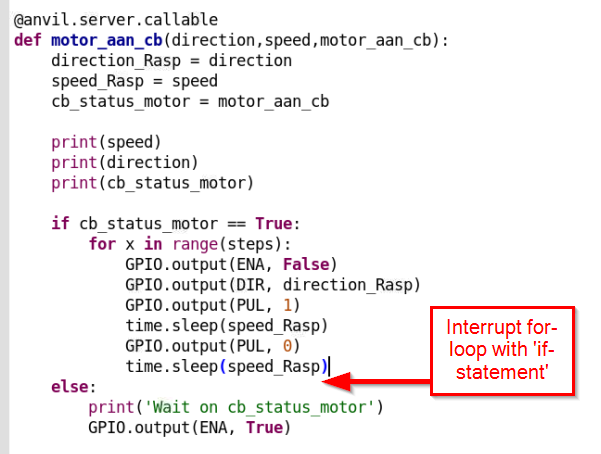
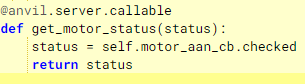
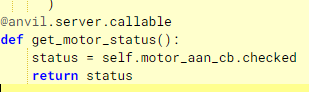
I want to make a interrupt (break) on the end of the for-loop, based on the status ‘cb_status_motor’ which I requested earlier.
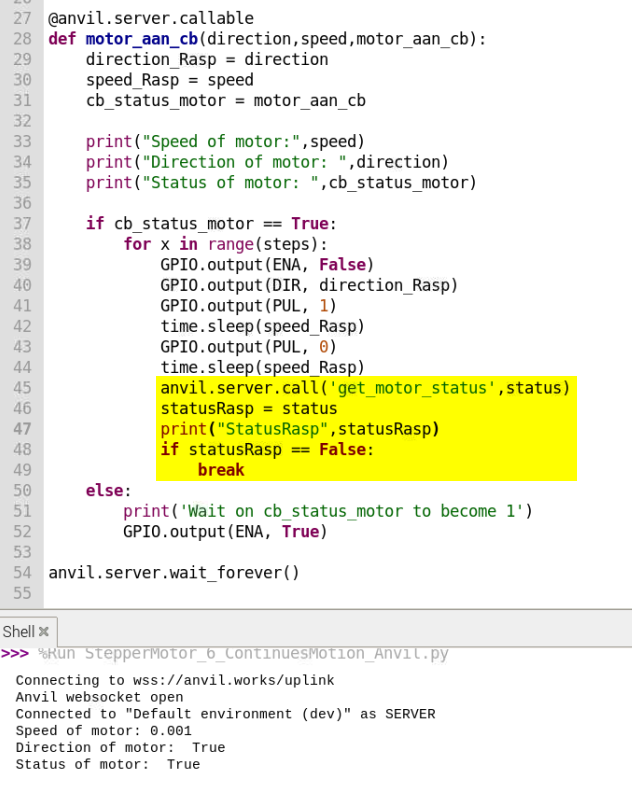
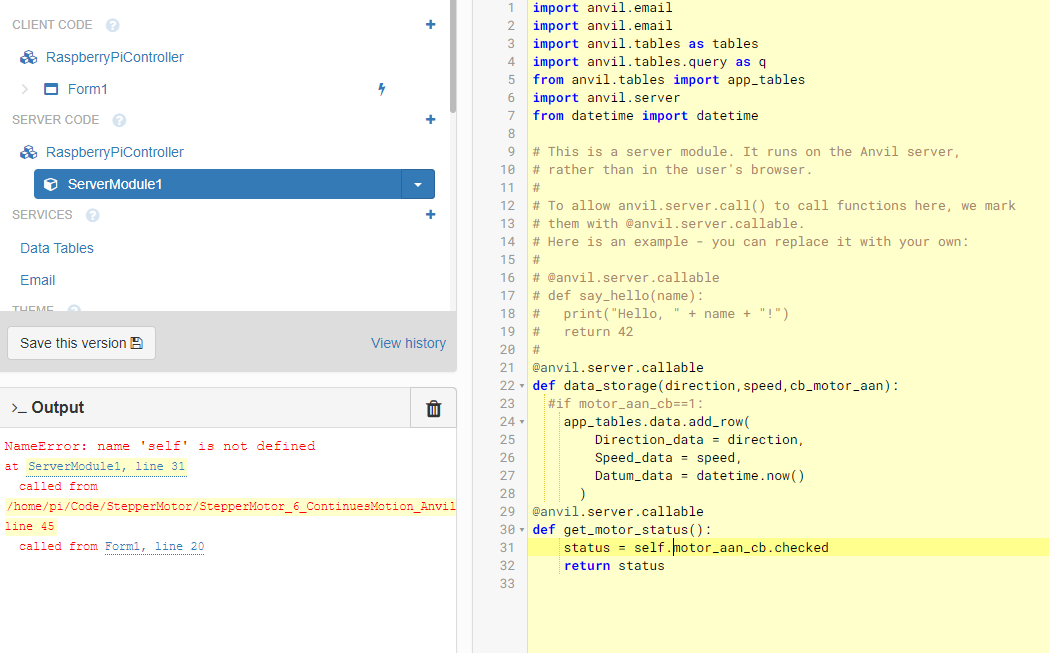
Is it possible to call back for the variable in Anvil, so to do a request to the Anvil server from the Raspberry Pi? Are is it breaking the server-client rule?
Hope this is clear! 
Kind regards,
Jan


 Thanks for the clarification!
Thanks for the clarification!



 It is not ideal, because in this way, you cannot turn off your motor using a web application, which is really cool.
It is not ideal, because in this way, you cannot turn off your motor using a web application, which is really cool.